
Hey everyone!
Just a short update so that you don’t think that I have disappeared completely. 🙂
Lately I am really busy so that is why my updates here are very rare. I have moved to California few months ago to work full time on Open-BLDC and Paparazzi. Although Open-BLDC got quite a bunch of attention there is still a lot to do, and this project is still not in a state where it is possible to put the controller on a vehicle and fly with it. 🙁
There is some good and bad news. I got the sampling based commutation detection running pretty good. There is an issue with it. Because you can sample the BEMF only once a PWM cycle the resolution prevents turning the motor very fast without adding some kind of an estimator or at least a PLL. So currently only 4000RPM with a 7pole pare motor are possible. 🙁
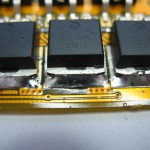
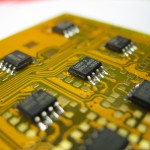
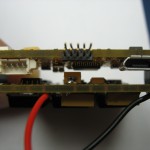
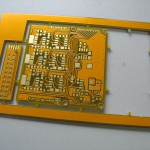
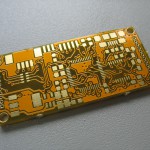
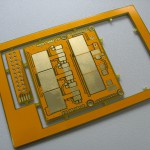
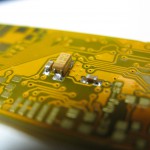
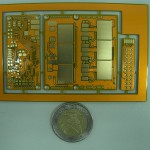
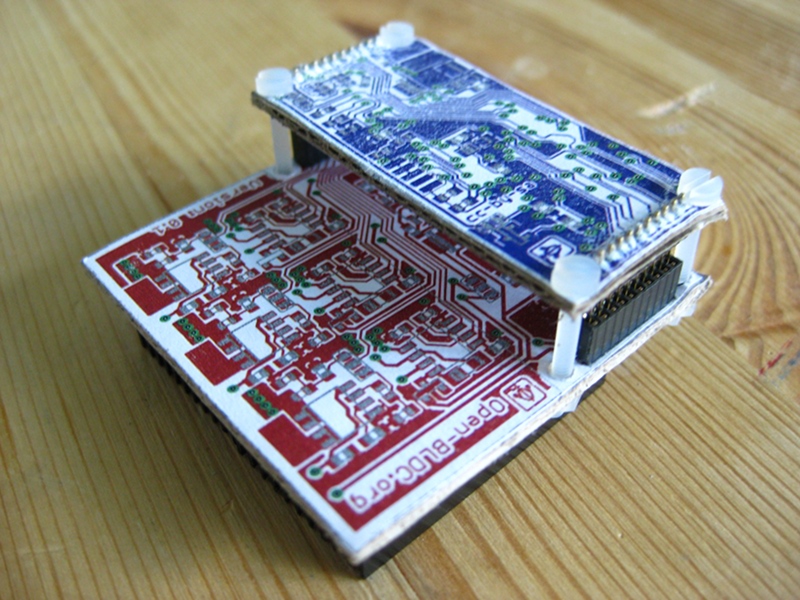
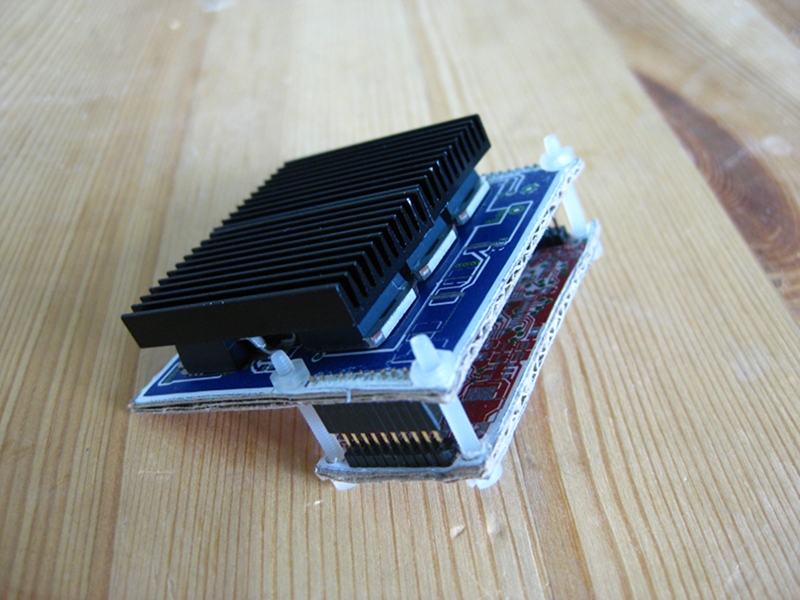
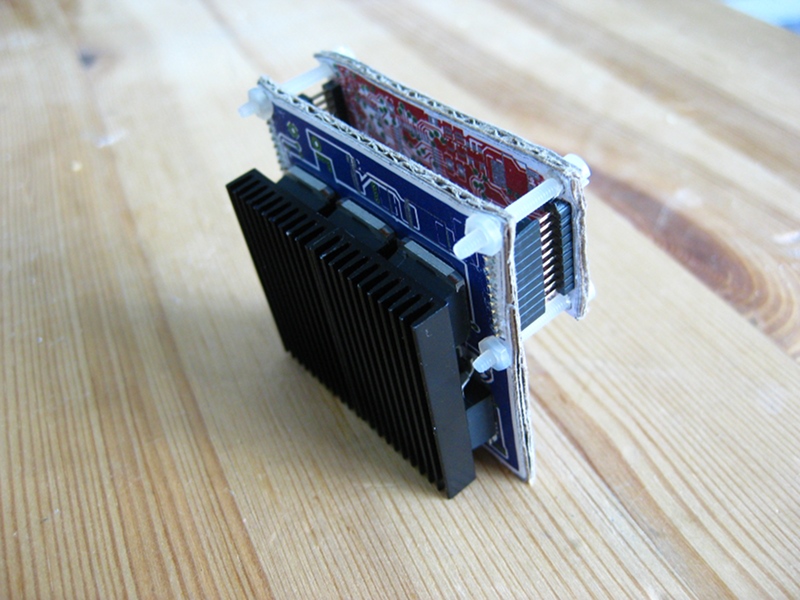
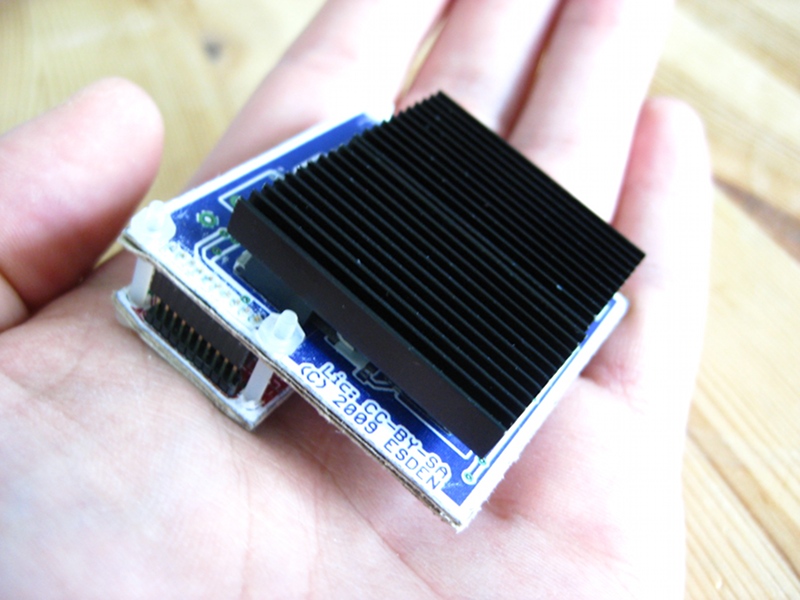
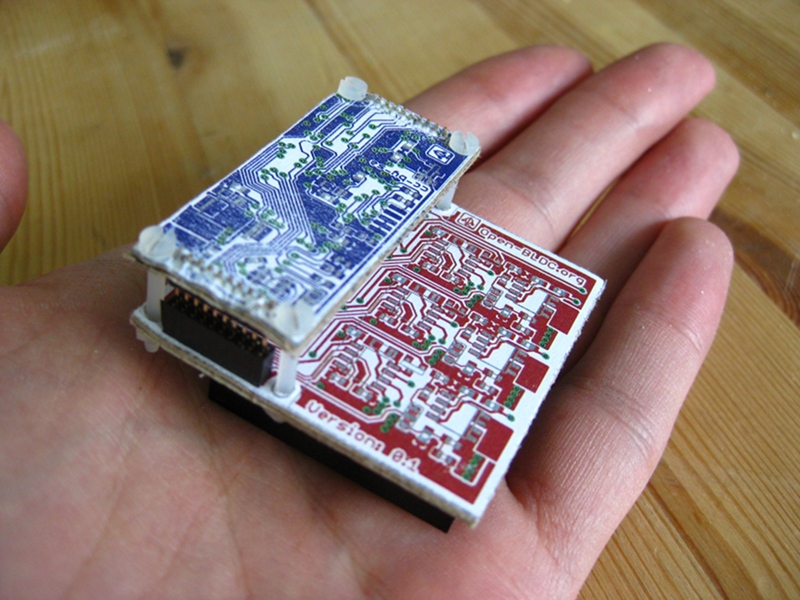
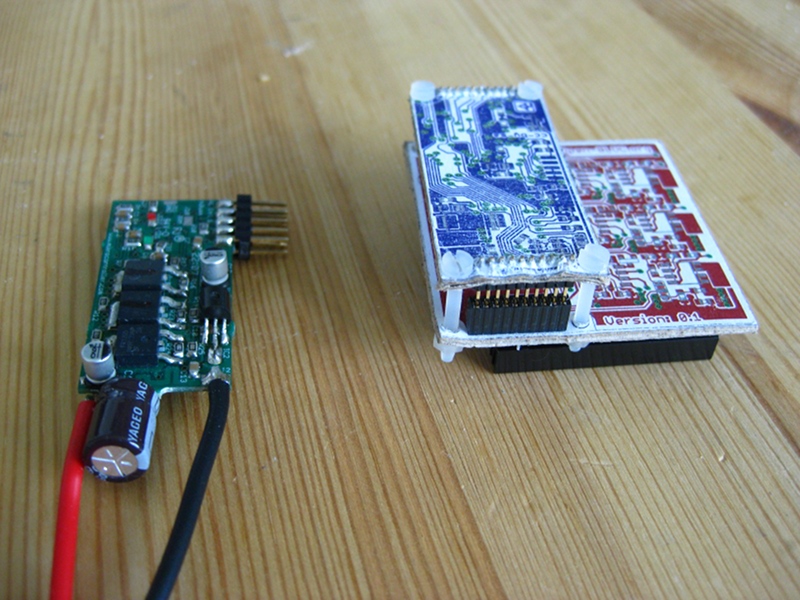
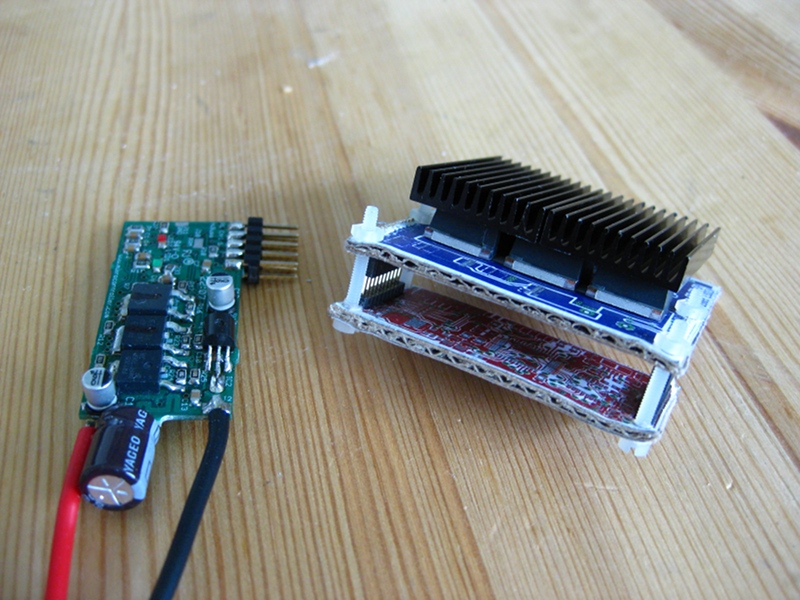
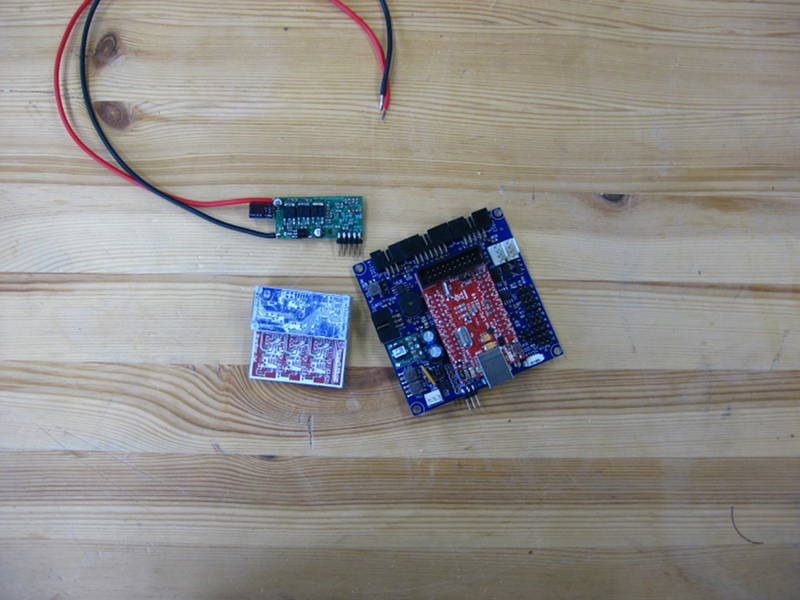
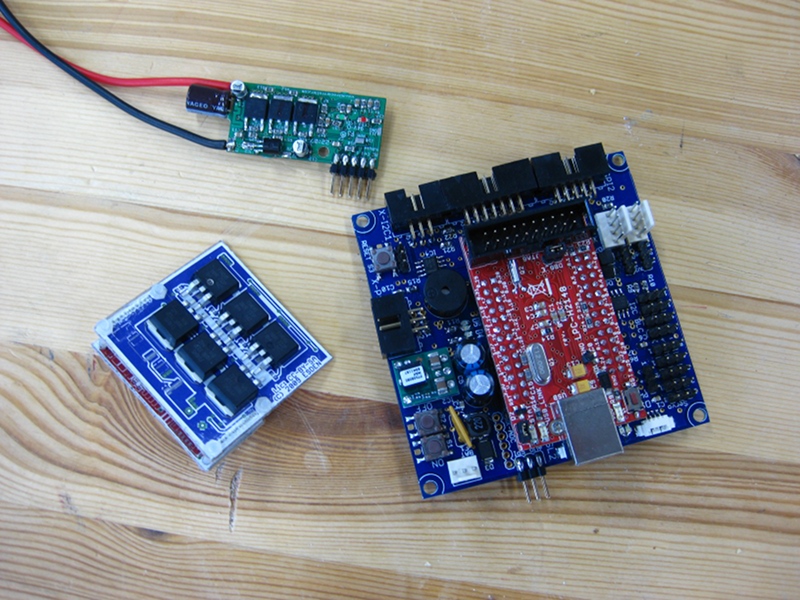
That is why I started working on Open-BLDC v0.3 hardware. It is assembled now and you can look at some pictures here. It has a comparator integrated into the power driver board to make commutation detection really easy and have something usable _NOW_. I also found out that using many small mosfet’s is much more efficient then using single big ones. The gate capacitance is lower, the heat dissipation is easier, the on resistance is tiny. The only question is if they will distribute the power evenly between the switches. That is still something that has to be tested. But the power stage board looks really pretty with all those tiny fets on it. There are many more other smaller and bigger improvements that would be too much for such a small post.
I am currently bringing up one subsystem after another. I had to change some of the connections to the STM32 which means that I have to change the low level drivers and it is always a pain to do.
Anyways, there is progress and Open-BLDC is not dead! I am working on it. And I am sorry for not keeping you guys more up to date. As always I will try to be better about that. 😉












































































{kind=link}
{kind=link}
{kind=link}