Hey everyone,
Hey everyone,
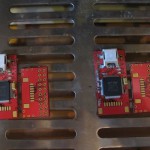
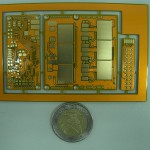
As you might know some time ago I have developed a small JTAG adapter based on the FT2232H chip. I gave it the name FLOSS-JTAG as the idea was that it should be absolutely OpenSource and OpenHardware.
You can find the project at GitHub and some more info at it’s random projects wiki page.
FLOSS-JTAG not only has the high speed 24MHz FT2232H chip (there are some designs based on my idea that are using a low speed version of the same chip). It provides the new standard 0.05″ pitch 10 pin Cortex JTAG header as well as a TTL level serial interface on it’s second interface.
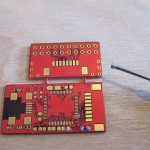
I am glad to announce that I have reached the V1.0 with it. All necessary files to make your own are in the GitHub repository. But if you don’t want to go through the pains of ordering PCB, sourcing parts, assembling QFN SMD packages you can also purchase it in the Joby Robotics online shop.
At Joby Robotics you get a cable assembly to connect the FLOSS-JTAG to a target. This allows you to debug and connect to targets that are difficult to reach otherwise. You also will get a cortex connector to old standard 20pin 0.1″ pitch connector adapter.
The adapter is small and will make it also easier to debug targets that are difficult to reach.
You can get precrimped Molex Picoblade wires in 10 different colors at Joby Robotics too. This way you can easily build a UART cable that connects FLOSS-JTAG to a device.
I am very happy that FLOSS-JTAG is finally easily accessible to anyone who needs it.
FLOSS-JTAG works perfectly together with Openocd and Summon-ARM-Toolchain.
Cheers Esden