Hi,
It was again a while since my last post, but as always I was quite busy. 🙂
The last news about Open-BLDC was about its V0.3 iteration. A lot has changed and happened since then. I was realizing that I am getting more and more inquires where people were asking about obldc being able to control very different sizes of motors, ranging from 12V and 10A up to 48V and 200A.
This requirement does not really ask for different logic and controls but it definitely asks for many different power stages. Open-BLDC was designed to be modular from the beginning but still to accomodate that kind of a power range it would be necessary to design and create quite a big lineup of hardware.
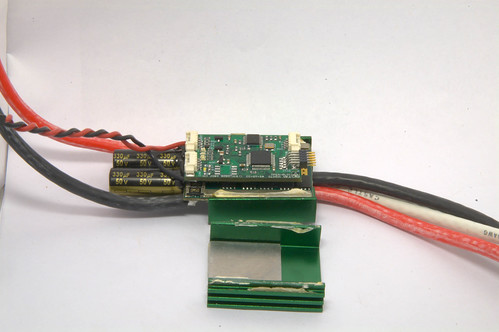
Around that time I had the opportunity to take a look inside a dead motor controller from Castle Creations just to realize that these guys seem to know what they are doing and that they went with a modular design too. To make a long story short I decided that it will be better to buy one of their of the shelf motor controllers and retrofit them with my logic. That is how CLogic was born.
As it seems other manufacturers are selling ESCs that have the same interface between the logic and the power stage too. Tekin for example. But my guess is that they are just OEM of castle themselves. But who knows. 🙂
Turingy also came out with an ESC that seems to have the same interface, the Turingy dlux. I ordered a few of them to take a look for myself and see if CLogic will fit in there. That would be a great source of cheep power stages. 🙂
CLogic has most of the functionality the Open-BLDC v0.3 had. Because of the size constrains I had to get rid of the dedicated i2c and PPM connectors, but I added isolation on the CAN interface that should provide additional safety when used on a 50V and bigger systems. The i2c and PPM interfaces are still available either over the new AUX connector or through the UART interface connector.
The new AUX connector gives the possibility of easily connecting encoders or hal sensors for sensored operation. So the interfaces stay very flexible with added flexibility due to the big variety of power stages you can use, while being very very compact.
Sure some people complained “The power stages are not Open-Source!!!”, yes that is true. Also these systems start at a higher power and weight class than some of you would want to operate them. That is why there is CPico Power. It is a very small, low power and a hopefully cheep power stage that we are putting together for those who want it all fully open! So no worries. 🙂
I think that wraps up the news about the new direction Open-BLDC is going. I hope you like it. I am looking forward to your comments.
Cheers Esden
Hello Esden .. good work
i ever look your news.
I like know that dlux use same interface.
I ordered some dlux to make a MOD.
Tell us about your success with this platform.
regards and good jobs
BTW, whrn you need a friend to be a beta-tester … i am here.
@agressivia Yes I am also looking forward to test those power stages. I don’t expect them to be overwhelmingly good at that price point. But they may be a good solution if you need something cheep.
About beta testing, there will be hopefully some more news on that soon! 🙂
Esden, today i received my first turnigy Dlux 55amp ESC
For my surprise, the logic stage use atmega8a.
I will adapt my firmware to this ESC.
Another good point is that RX/TX are a connector on board edge.
I am very happy because it use atmega8 .
if you need the schematic i can provide to you.
regards.
Did you use the OBLDC controller in the quadshot or quadcopter projects? Do you use one ARM per motor, or are you able to control multiple motors with a single processor? I was wondering if micros could drive multiple BLDC motors at the same time, but my first google searches turned up what looked like someone’s academic thesis on the topic, so it seemed likely that it was a lot more difficult a problem than I thought.
Most of this line of thought came about when I bought an off-the-shelf ESC and realized that you effectively controlled it with an analog signal which I didn’t like very much. The ideal situation would be to be able to control multiple motors from a single micro, or, barring that, digital command and control from a central unit. Though I wouldn’t be surprised to learn digital control had its own issues.
I saw your Kit oBLDC0002 and I found it very interesting. I would like to know if it is possible for me to have the Software for ATMega8. Thank you in advance, Angelo Rosselli
@naimis: No sadly I did not use open-bldc on any of those projects as they are price prohibitive. There is no space for $150 motor controller in a $400 aircraft sadly. 🙁 Yes each motor is getting one stm32. I know several people did combine the control into one mcu or even one board. I really don’t like those solutions at all. It is a single point of failure, as well as the timing requirements become even more complicated if you have to drive two motors from one mcu. Also controlling the motor controllers using PWM as signal input is not as bad as you may think. It is really very robust to EMI noise. The only disadvantage is that you don’t get any data back from the controller about it’s current speed and torque. That would be very useful information to the controller.
@Angelo Rosselli: No, the implementation is for cortex m3 stm32 mcu. I am not planning to port the code to atmega.
I’m a student at the Department of Engineering at Tokyo Denki University. My major is Electric and Electronic Engineering.
I’ve stumbled upon your project, the Open-BLDC and would potentially be interested in helping with the project.
My problem with most ESCs on the market is very well described at http://www.youtube.com/watch?v=1WIEkUDIeaI . As the post there says, what I basically would like to do is drive a DC48V BLDC to be loaded on a model-Jet RC Airplane and/or a Quad-Copter which my friend is working on.
I potentially knew that I had to optimize the ESC for the specific motor that I was going to use, and even before I knew about the voltage issue this morning, I had sensed that on-the-market products just won’t do the work that I want to see. So, by now I’ve got myself one of the latest references available for BLDC-controlling (Published in Jun.2013) from the university’s library.
At first, I might not be equipped with sufficient knowledge or skills since I’ve only completed my second year at school and have no special backgrounds on controlling stuff (but I can solder well I have mostly focused on building Class-A audio amplifiers for pleasure), but I hope that I can quickly catch up.
Hoping to hear back from you.
Regards,
Hello thanks for working on open source BLDC! I am interested in a controller for a solar muscle electric racetrike for long distance racing. Currently my target spec for driving a Crytalyte hub motor is 154V (48s LFP) but only 20Amp max. I think higher voltage lower current is a path to efficiency and high RPM!? I hope you consider that when selecting gate drivers and such… I wonder is this effort toward a highly efficient silent sinus type of controller? Thanks for your time!
Hi Esden,
I’m looking for a an ESC platform on which I would be able to replace the feedback control loops for quadcopter applications. It seems that most systems use the SimonK firmware. Do you have any recommendations for a project that could serve as a starting place?
Thank you in advance!
As your Question was sitting here for a very long time. I assume my answer will be more or less irrelevant. 😀 But if you are still interested SimonK is pretty good. I also heard and saw some very good results with the BLHeli firmware.